
・ロケットのフィンに関する質問
・作用反作用に関する質問
・無重力下におけるマグヌス効果についての質問
ロケットのフィンに関する質問
・なんでロケットが短いとフィンがながい方が良いのか?
・羽をつけるとどんなものも安定して飛ぶのか?
・羽をつけるとなんで安定して飛ぶのか?
・ロケットの羽以外の姿勢制御の仕方でどんなものがあるのか?
・ロケットの大きさに対して、フィンの大きさはどのくらいの大きさが適切か?
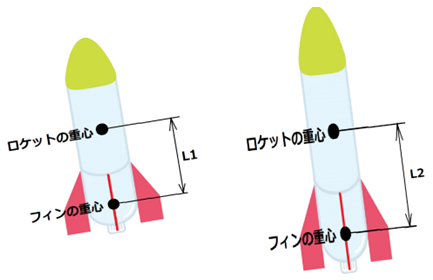
ロケットが曲がろうとする場合、ロケットの重心を回転軸にして回ります。そのときに向かってくる風をフィンが受けて姿勢を保とうとします。
これは風見鶏の原理と一緒で風見鶏は尾の部分が風を受けて回転しようとするため、風見鶏は常に風上を向いているのです。
これは「てこの原理」を思い出してください。
短いロケットはL1が小さく、長いロケットはL2が長くなります。従って、長いロケットの方がフィンで受ける力は小さくてすみます。そのため、長いロケットはフィンの面積が小さくてよいのです。
水ロケットの実験でのフィンの効果は一般的な飛行物体にも適用される原理と言えますが、具体的なフィンの大きさ等についてはロケットの形状や重量及び速度、空気の密度等の様々な要因が影響するため、これについては数多くの実験データで考えることが必要になります。
姿勢制御の方法は大気中を飛行する物体での姿勢制御とロケットが大気のない宇宙空間で行う姿勢制御とありますが簡単に説明します。必要ならば、ネット等で調べてください。
・大気中では物体の表面に取り付けられた可動翼(動くようになっている翼)を設け、その翼の角度や位置を変化させることで空気力学的な力を発生させ、物体の姿勢を調整します。
姿勢の変化を検知するのにジャイロスコープを使用します。
・スラスター:スラスターの点火や消火をコントロールして物体の姿勢を調整します。
・ジャイロスタビライザー: ジャイロスタビライザーは、回転体の運動に基づいてロケットの姿勢の変化(角度や回転速度)を検出し、補正のための制御信号を生成して物体の姿勢を安定させることができます。
他にリアクションホイール、リアクションジャイロなどがありますが、これらの方法は、ロケットの姿勢制御を実現するための一部です。実際のロケットでは、これらの要素を組み合わせた複雑な制御システムが使用され、安定性と操縦性を確保します。
作用反作用に関する質問
作用反作用はいかなる場合にも働くか(どんな条件でも絶対に働くか)
「物体Aが物体Bに力を及ぼすならば、物体Bは物体Aに対して同じ大きさで逆向きの力を及ぼす。」この法則は、力学的な相互作用に関する一般的な原理を表しており、いかなる場合でも成立します。ただし、むずかしいので省略しますが、光速に近い速度での運動や非常に重い天体の周りでは、アインシュタインによって提唱された特殊相対性理論の考え方が支配的となり、ニュートン力学第三法則では正確に記述することができないといわれています。