ロボットの組み立て
1 キャスター(後輪)の組み立て
2 RaspberryPiの準備
3 電源回路を組み立て
4 ホールセンサーの取り付け
5 タイヤ回りの組み立て
6 単3電池ボックスの取り付け
7 充電バッテリーの取り付け
8 モータードライブの取り付け
9 モータドライブの配線
ロボット講座の7回目です。いよいよロボットカーの製作に入ります。早く完成すればプログラミングをして動作を確認する予定でしたが、これは宿題になりました。細かな作業の連続ですが、黙々と、時にはお家の人と一緒になって頑張って完成させました。初めて見る電子部品もあります。
1・2・3 キャスターの組み立て、RaspberryPiの準備、電源回路の組み立て

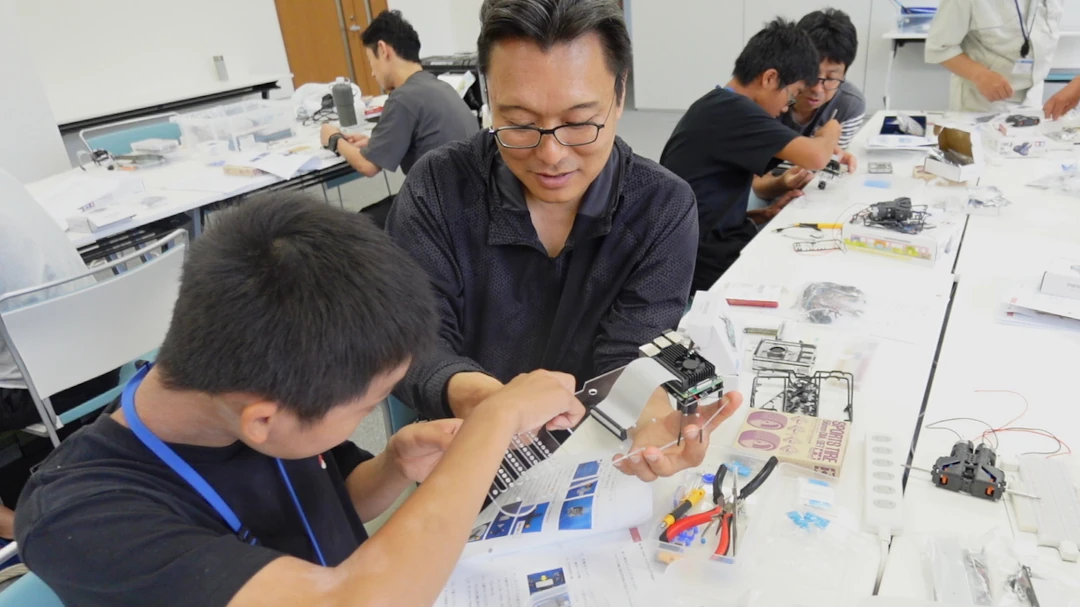
ロボットカーの前輪はモーター駆動でRaspberryPiによってコントロールします。一方、後輪は図のキャスターを使います。25mmの高さに組み立て15mmスペーサを取り付け、アクリルのシャーシに取り付けました。また、RaspberryPiはケースから出してヒートシンクと冷却ファンを取り付けます。
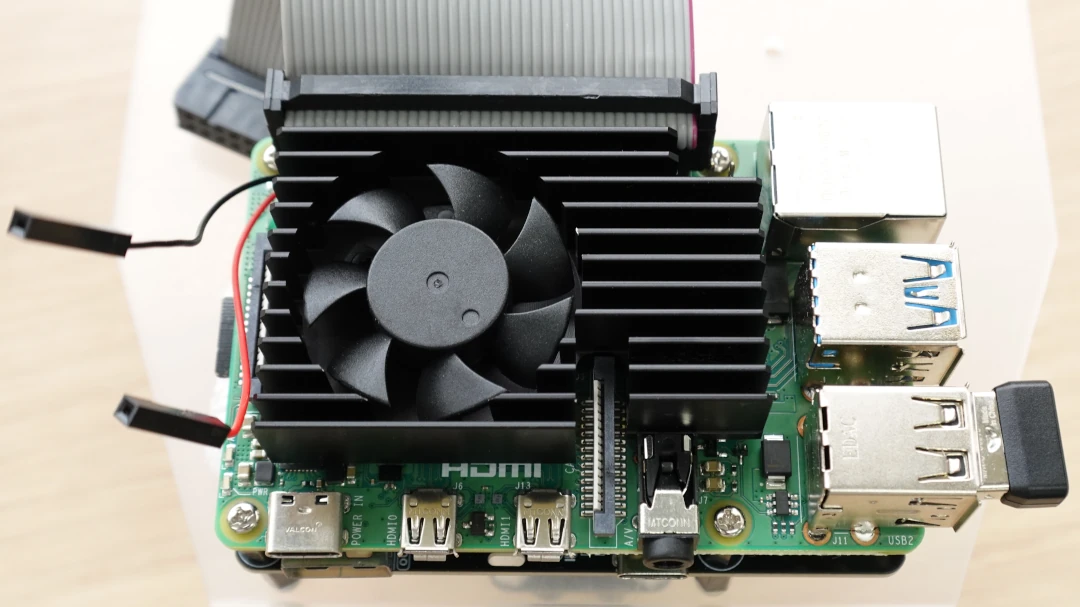
さらに、RaspberryPiのボードの下に電源回路をスペーサを介して取り付け、RaspberryPiと電源回路をシャーシに取り付けます。

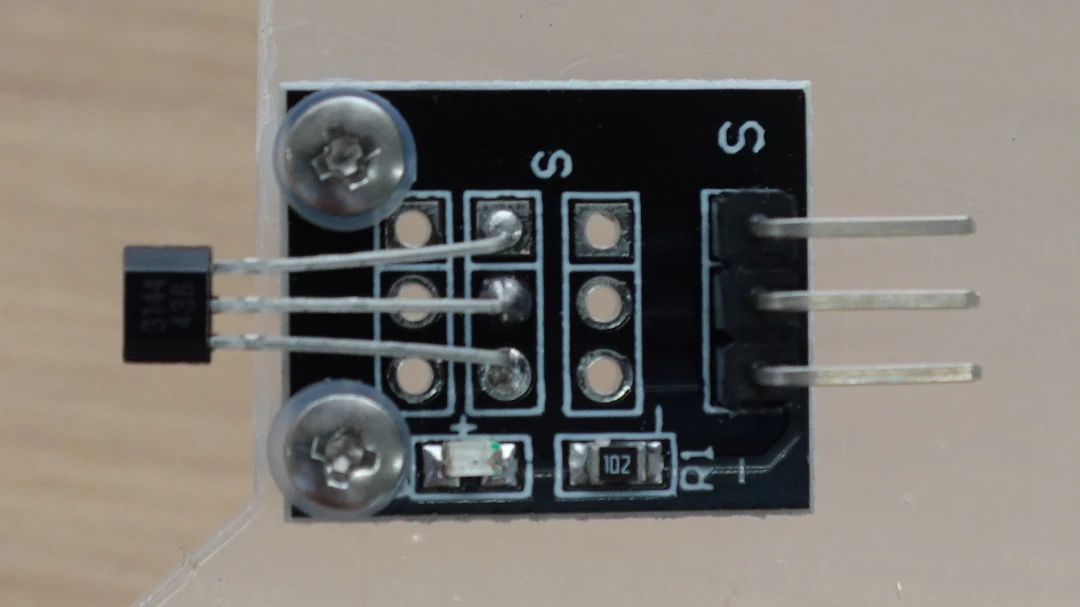
4 ホールセンサーの取り付け
ロボットカーの速度や位置をコントロールするために、車輪に磁石を取り付け、この磁気を検知する非接触式のセンサー「ホールセンサー」で車輪の回転数や回転速度を入力できるようにします。シャーシにホールセンサーを取り付けます。小さなねじやワッシャーをつかって取り付けていきます。
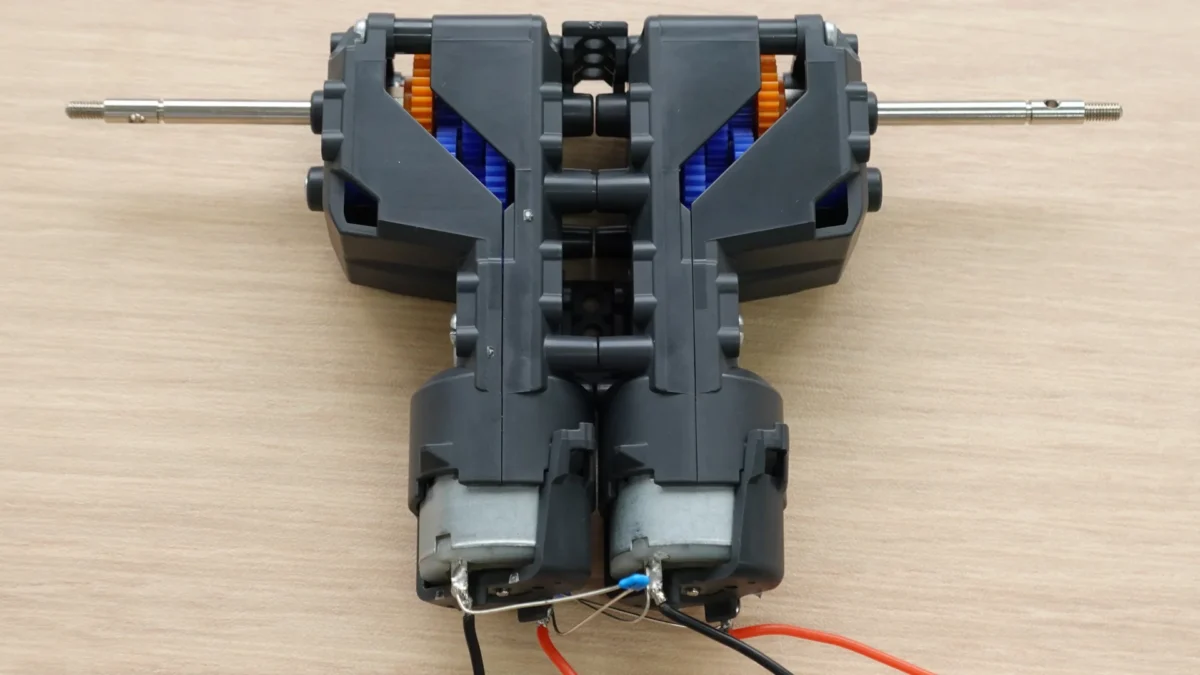
5 タイヤ回りの組み立て
タイヤセットを組み立てます。タイヤの内側に磁石を2箇所、接着剤で貼り付け、ギアボックスに車輪を取り付け、シャーシに固定します。この磁石の磁気をホールセンサーが検知します。

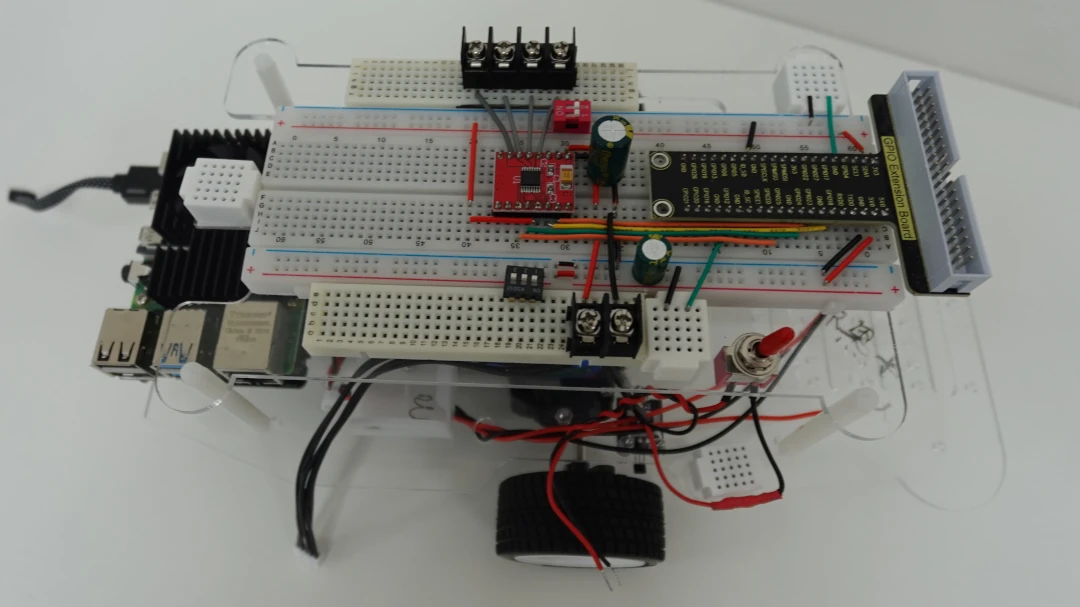
6・7 単3電池ボックス・充電式バッテリーの取り付け
シャーシに取り付けたRaspberryPiの横に、接点が左になるように電池ボックスをねじ止めします。また、電池ボックスの横に充電式バッテリーを両面テープを使って取り付けます。充電式バッテリーはRaspberryPiの電源になるので、配線が取り回ししやすいように電池の向きに要注意です。

8・9 モータドライブの取り付け・配線
次にブレッドボード上の組み立て作業に入ります。ブレッドボード上に、モータードライブIC、4連ターミナル、2連ターミナル、3連スイッチ等を取り付けていきます。
ロボットカーのモーターの回転を制御するために、モータドライブICを使用します。写真の赤い基板上にのったICです。これをブレッドボードの中央に取り付け、各ターミナル、スイッチを配置します。配線の取り巻きがしやすいように向きを考えて配置します。
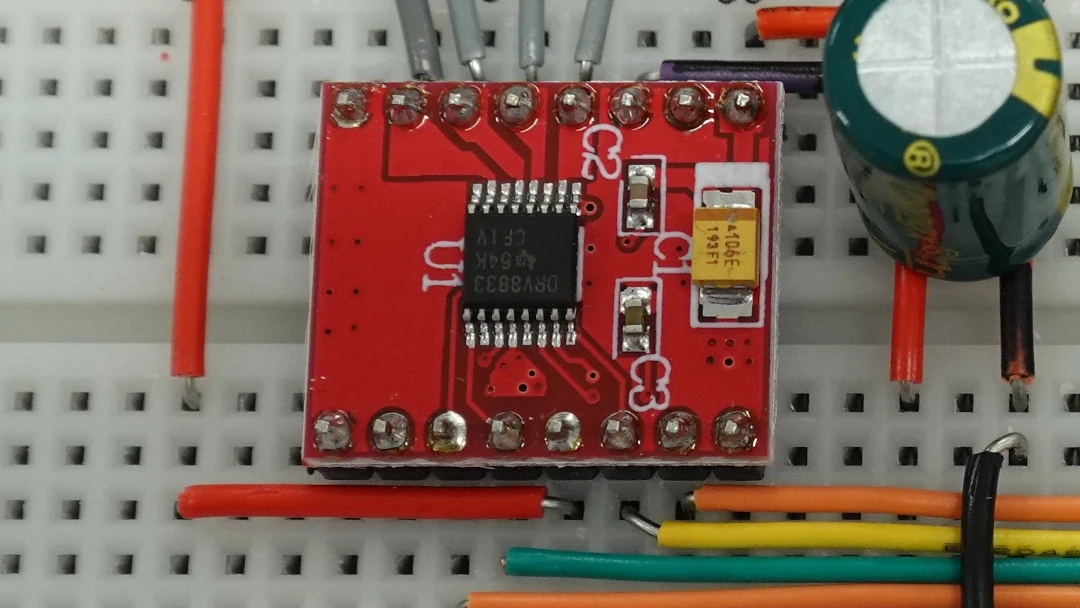
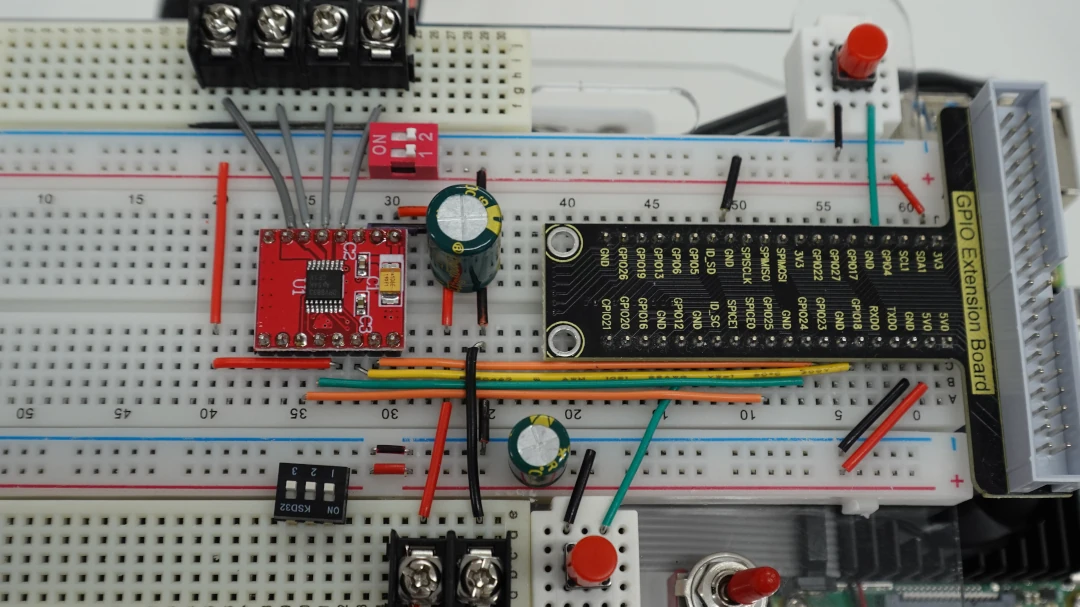
1000μFのコンデンサをモータドライブICの横に配置します。また、470μFのコンデンサをブレッドボードの電源間に接続し、さらにRaspberryPiとモータドライブを配線し、電源スイッチを取り付けました。
最後に3連端子にモータを配線します。正しく接続しないと回転方向が変わってしまいます。実際にモータを電池につないで回転方向を確かめて配線していきます。
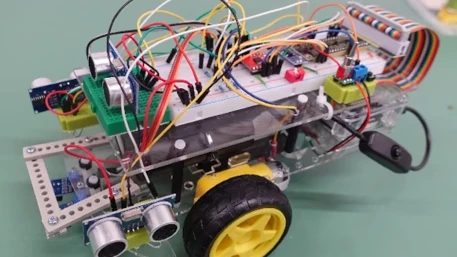
完成には、まだ超音波センサーを取り付けたり、その他の作業が残っていますが、ひとまずモータをコントロールできるところまで進みました。