Python(パイソン)プログラムの初歩3
1 プログラムの流れ
2 分岐文の種類(バリエーション)
3 最後に(まとめと課題)
ロボット講座の4回目です。前回に続き、Pythonプログラミングの初歩を学びました。プログラミングの初歩は今回で終了し、次回からロボットカーの作成に向けた電子回路の学習と工作が始まります。
今回は、おもに分岐文について学びました。
プログラムの流れ(どのような順番で処理が実行されていくか)にはいくつかのパターンがあります。上から順番に実行する順次タイプ、繰り返し実行するループタイプ、そして条件によって命令を分けて実行していく分岐タイプです。
IF文だけを使って、True(真)の場合にのみ処理を行い、False(偽)の場合は次へ進むプログラムに挑戦!!入力した数が偶数か奇数か判定するプログラムを作りました。
さらにいろいろな条件分岐へ。IF~else~を使って、False(偽)の時に別の処理を行うプログラムに挑戦!!クイズをつくり、正解の時は”正解!”と表示され、間違っていたら答えを教えてくれるプログラムを作りました。
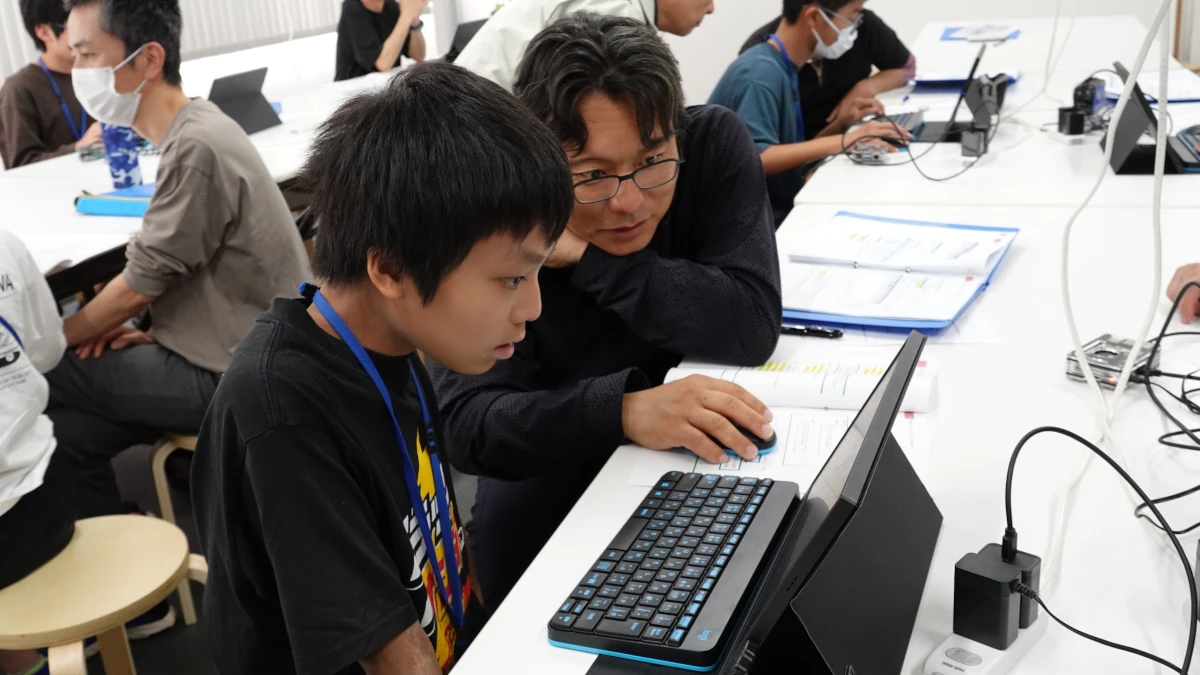
さらに条件を増やして、if~elif~else~を使って、複数の条件<条件1、条件2・・・>によって判断を行い、それぞれの条件で設定した処理を行うプログラムに挑戦!!タートルモジュールを呼び出して、入力した数(1・2・3)によって、カメに直線を引きながら前進させたり、後退させたり、左に90°向きを変えて四角形を描かせるプログラムを作りました。みんな真剣です。できたときの笑顔がいいですね。さらにカメの動きのカスタマイズに取り組んでいる受講生もいました。

この条件分岐のプログラムはロボットカーを自作してコントロールしていくときに、障害物を避けたり、コースに従って動きを自動的にコントロールさせるときなど、とても大切な要素になっていきます。
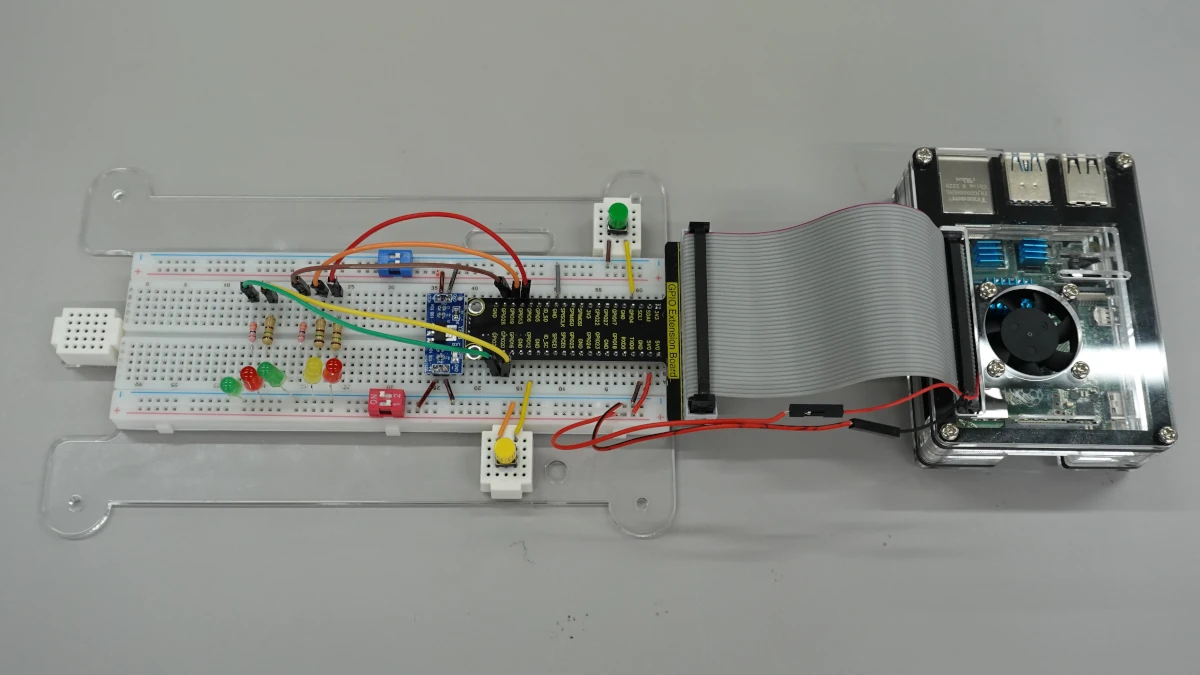
Pythonプログラミングの初歩を終え、いよいよ次回講座からロボットカーの作成と制御に向かっていきます。電子回路の基礎を学習したら左写真のようなブレッドボード上に作った回路をRaspberryPiに接続して、RaspberryPiでコントロールする方法に挑戦していきます。