
ロボット講座も今回で最終回です。
最後はライントレースの競技会を開催しました。小学生の皆さんは親子でロボットのセンサ配置やプログラミングを考えながら、より良い走りとなるように調整しました。
フォトセンサは赤外線を送受信してラインの有無を確認しているため、赤外線を多く含む外光が入らないように、また、部屋の照明は赤外線がそんなに放出しているわけではないのですが、影響をできるだけ排除して行うために競技会場の照明は落として行いました。
ロボットの調整とプログラミングの改善
例えば新しい電池と交換した場合、古い電池の時よりも電圧が高くなるので、その分スピードや力が大きくなってしまいます。また、センサの位置によってもプログラミングを変更する必要も出てきます。最良の調整で競技を行うため、様々な調整が必要になってきますね。


直線10mコース競技
きれいな走りです。
これはセンサ配置が適切で、そのセンサ配置に対して左右のモータに加える電圧をプログラミンで調整しているからですね。
タイムも好成績でした。
もうちょっと!!
がんばれがんばれと応援したくなりますね。でもゴールにはたどり着きました。
プログラムの中での電圧調整が今一歩のところですが、センサの反応をしっかりとらえていて、行き過ぎたことを気が付いて戻しています。だからプログラムとしてはよいのですが、モータに指示する値の調整とセンサの位置の調整がもう少しなんですね。
直線とカーブが混在するコース
直線とカーブが混在するコースのむずかしさは、センサがコースを離れたときにどのような指示を与えるかですね。直線だけとわかっていれば、コースからはずれたときに大きなカーブを描くようにゆっくり戻せば大丈夫なのですが、カーブでコースをはずれたときは大きなカーブではよりコースからはずれることになり、ついに暴走してしまうことになります。
そこが皆さんがどのように指示するかという腕前の競い合いになります。
カーブがあるとわかったときにスピードを落とし、小さなカーブを描くように指示する。でもカーブではなく直線ラインで少しコースからはずれたと判断したときは大きなカーブを描くように指示すると同時にスピードはあまり落とさずに走行させる。
スピードを競う競技の場合のむずかしさですね。
上に示した3人の動画はスピード重視でカーブを重点に考えたプログラムになっています。もう少し、直線部分がまっすぐに走れるようになると良いのですが、結果としてはよいタイムがでました。
一方、左の人の動画はとてもきれいな走りになっています。しかし、その分、スピードが遅くなりました。でも「きれいな走りだったで賞」いう賞を与えたいですね。
入江教授の講評及び講演
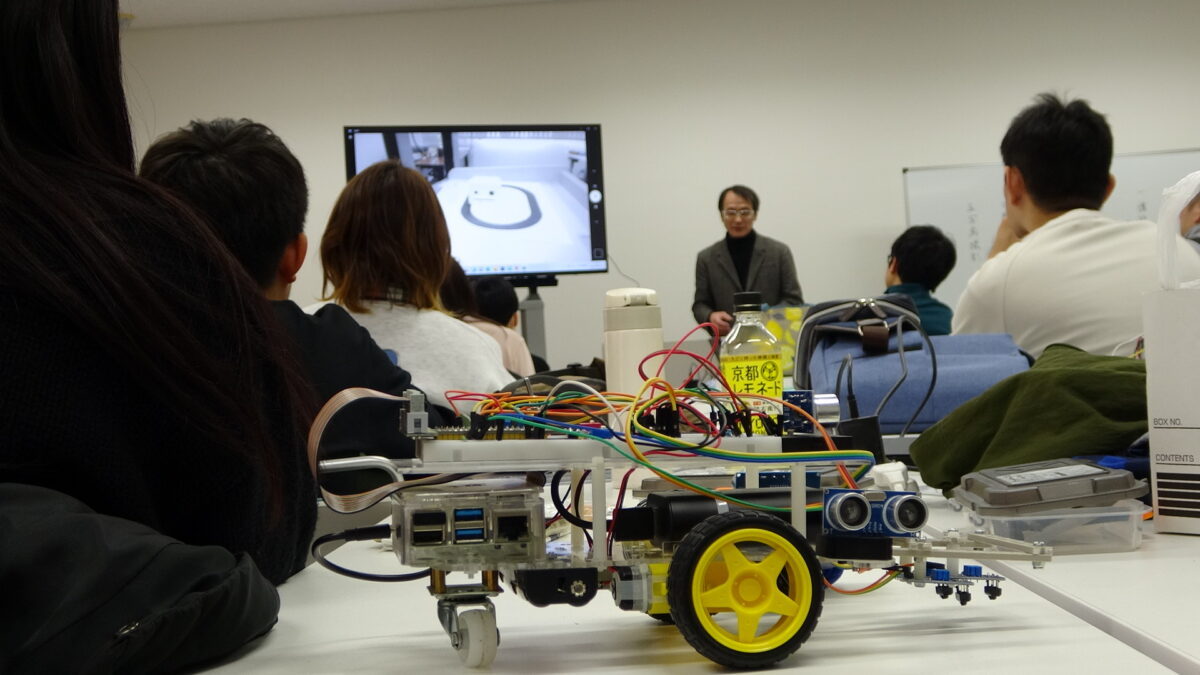
日本大学理工学部「知能化ロボット研究室」の入江寿弘教授から講評及び講演をしていただきました。
その中で、ロボット製作からロボットの未来像までお話しいただき、とても勉強になりました。
デザインから製品の加工まですべて研究室の大学院生が手作りで製作したかわいらしいロボットをデモ走行してくれました。
外観などは三次元CADで製作したものだそうです。
表彰式・修了式
天野工業技術研究所の川幡長勝理事長から表彰状の授与及び修了証書の授与と講話をしていただきました。

1年間を振り返って
1年間の講座を終えて、反省すべき点や教材の工夫すべき点など多くを学びました。
次年度に向けて
1 カリキュラムの改善
少しむずかしい書き方もあったため、大幅に見直し、進める順序や資料なども改善していきます。
プリント学習は継続しますが、家庭で考え工夫するような課題を、毎回、与えていこうと考えています。
2 ラズパイ仕様の見直し
(1)ラズパイは4Bのまま実施。新しく出たラズパイ5は性能がかなり向上していますが、電源が5V5A必要で、ロボットに搭載するには不向きと判断しました。
(2)今までのロボット本体はシャーシ、モータ、車輪付きで安価(外国製)でしたが、車輪が一体型でないため左右同じ電圧で回転させてもまっすぐ走らないという不便さがありました。しかしその分勉強にはなったかと思いますが、何もしないでもまっすぐ走るタミヤ製の減速機とタイヤを使用することとしました。ただし減速機についているモータが1.5~3Vなので、6Vに変更します。これによりプログラムの方にもう少し力を入れる時間が確保されるのではないかと考えています。
本体のシャーシは自分で設計、レーザー加工で作ることにしたので、ロボット講座専用の仕様となります。
(3)ラズパイ電源は今年度はモバイルバッテリーを用いましたが、重くなることと接触不良が少しあったので、リチウムイオンバッテリーを降圧して使用することとしました。
3 プログラミング
プログラミングは興味の持つ生徒はこちらから何も言わなくてもどんどん進んでいきますが、嫌いと思った生徒はその途端にやる気がなくなってくる傾向にあります。これは算数や数学と同じです。公式を暗記して問題を解くことができるのであればよいのですが、むずかしくなってくると問題を解く手順をまず考えて必要な公式を利用するようにしないとできないからです。この問題を解く手順を考えることがワクワクするかどうかで好き嫌いが生じてくるように思います。
このワクワクする気持ちを作っていくのがアマノ科学教室の目的でもあるので、次年度に向けて教材を再考し、皆さんがワクワクできるような講座となるように心掛けていきたいと思っています。
4 競技内容の変更
今年度はフォトセンサを使った10m直線コースと直線・カーブ混在コースでの競技を行いましたが、次年度は講座の集大成として、今年度と同じフォトセンサを使った直線・カーブ混在コースと超音波センサを使った迷路脱出競技を行う予定です。
1年間皆さんと一緒に学ぶことができて、とても楽しかったです。ありがとうございました。