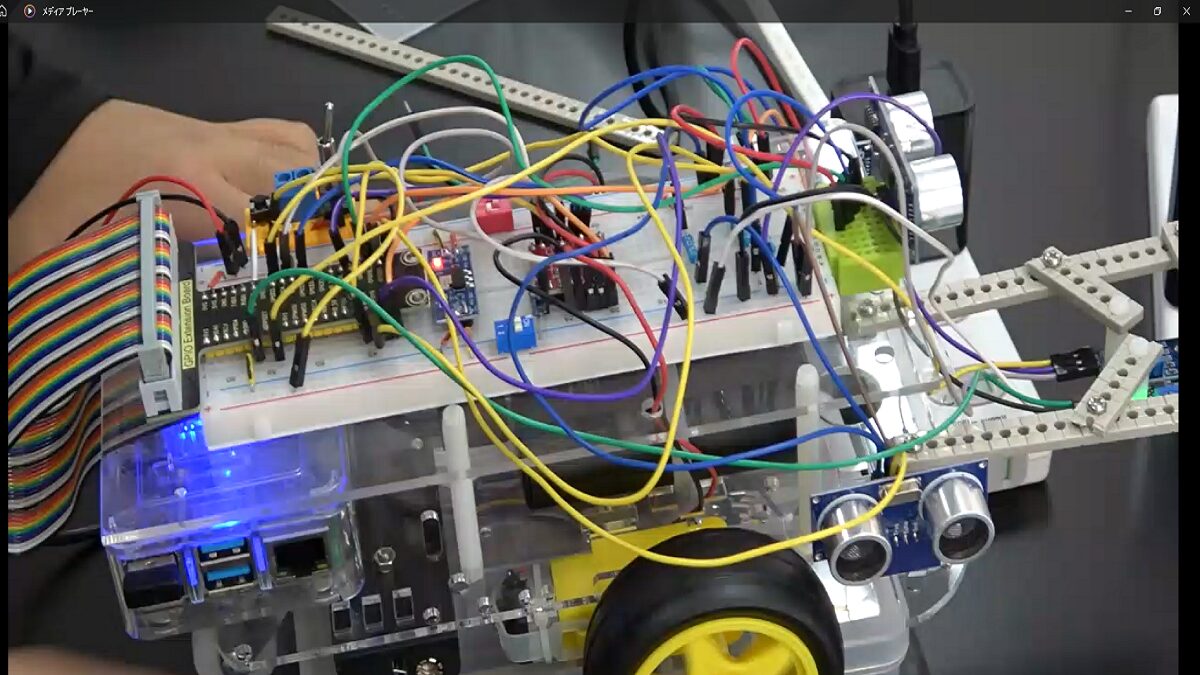
今回はフォトリフレクタをロボットに搭載しました。これでロボットは完成です。
フォトリフレクタ(反射型赤外線センサ)を使ってラインを判別して、ラインに沿ったコースを走ります。
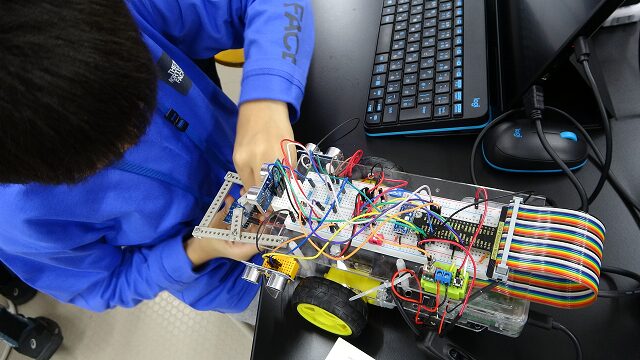
自分のマシンの性能を確認しよう
両輪に均等に電圧を加えたとき、直進する?右に曲がる?左に曲がる?
まずは自分のマシンがどのような動きをするのか確認します。
そのデータに基づき、プログラミングでの左右の両輪に加える電圧(デューティ比)を調整します。
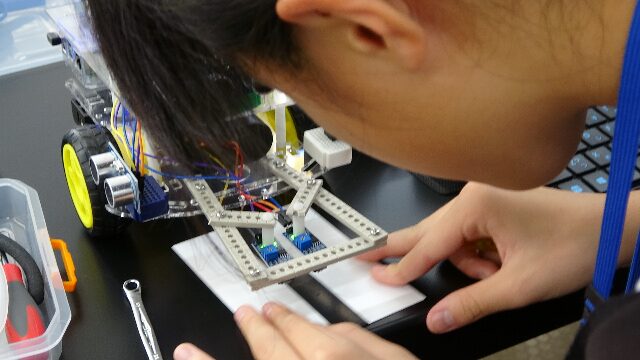
センサの取り付け
センサはどの位置にどんな間隔で取り付けたらよいか

センサの感度調整
プログラミング
感度調整もしたので、いよいよプログラミング
自分のマシンに応じたデューティ比を与えて、うまく動くかな?
